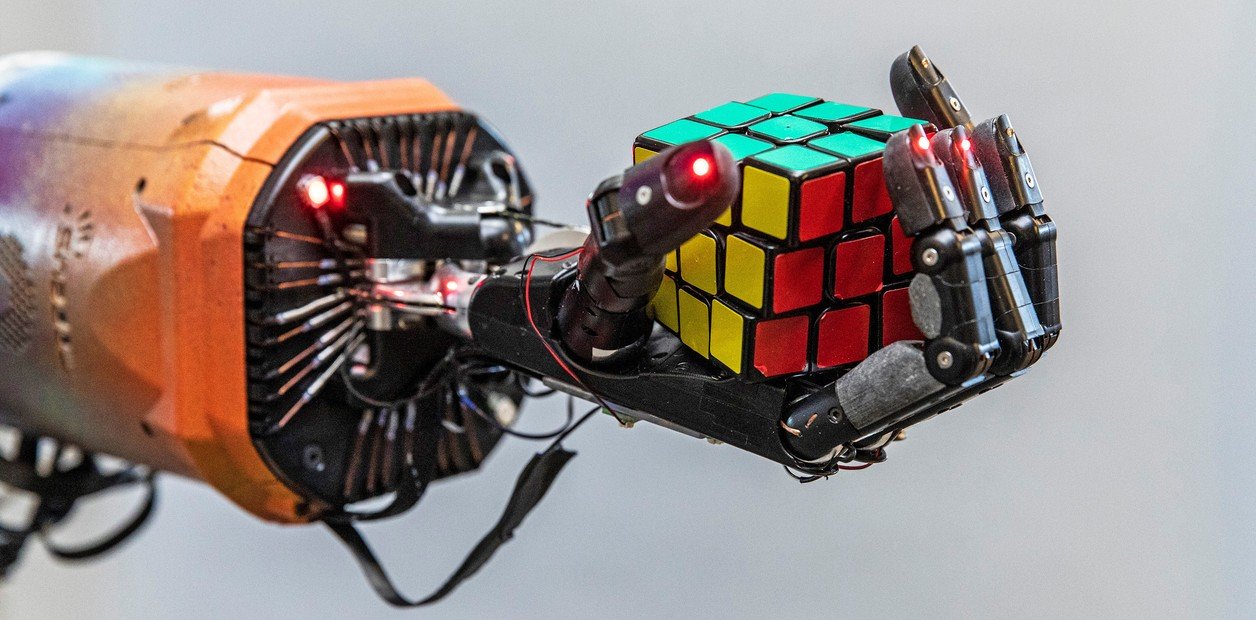
La robot Dactyl ahora puede resolver un Cubo de Rubik en unos tres minutos usando sólo una mano robótica , una tarea que requiere niveles de destreza que incluso los humanos encuentran difíciles de alcanzar.
En una declaración elogiando su trabajo, los investigadores dijeron que la mano, apodada Dactyl, llevó la robótica un paso más allá en su objetivo de reproducir los movimientos mecánicos del cuerpo humano.
“Resolver un cubo de Rubik requiere una destreza sin precedentes y la capacidad de ejecutarlo impecablemente o de recuperarse de los errores con éxito durante un largo periodo de tiempo”, dice la declaración. “Incluso para los humanos, resolver un cubo de Rubik con una sola mano no es una tarea simple. Hay 43.252.003.274.489.856.000 maneras de mezclar un cubo de Rubik”.
Con este resultado -agrega la declaración- los investigadores esperan eventualmente crear robots para distintos tipos de propósitos, con una técnica que debería permitirles resolver de manera adecuada cualquier tarea que requiera mucha destreza como pintar o cocinar.
/arc-anglerfish-arc2-prod-infobae.s3.amazonaws.com/public/BG6I3446WJBQJKNTPFVUPAPOAA.jpg)
El sistema fue desarrollado por investigadores de OpenAI, una empresa fundada en 2015 con el apoyo de Elon Musk. El año pasado se hicieron conocidos porque desarrollaron un bot que venció al equipo campeón del mundo de un videojuego complejo llamado Dota 2.
El equipo entrenó a una mano robótica desarrollada por Shadow Robot Company usando una técnica de ensayo y error llamada aprendizaje por refuerzo. Es decir, el software aprende al ejecutar una tarea exitosamente y también cuando no logra. “Inicialmente [el sistema] no sabe nada sobre cómo mover una mano o cómo reaccionaría un cubo si se empuja por los lados o por las caras”, dijo Peter Welinder, uno de los investigadores.
La IA conseguía puntos cuando realizaba con éxito una maniobra como voltear el cubo de Rubik o girar una cara del cubo y estaba programada para intentar maximizar su puntuación. Enseñar al sistema a manipular hábilmente un objeto fue un desafío debido al gran número de puntos de contacto simultáneos entre el cubo y la mano robótica, dijo Lilian Weng, que también forma parte del equipo.
/arc-anglerfish-arc2-prod-infobae.s3.amazonaws.com/public/LLXYVBEPFJHLBNKTMDIWV45QXI.jpg)
Para preparar a Dactyl para su misión, los investigadores de OpenAI dicen que no “programaron explícitamente” la máquina para resolver un cubo de Rubik. En realidad, el robot fue entrenado usando simulaciones virtuales que lo sometían a distintas situaciones.
El objetivo, dicen los investigadores, era crear un robot que aprendiera de la misma manera que los humanos: a través del ensayo y el error. De esta forma, Dactyl se vio obligado a aprender a sujetar y mover el cubo por sí mismo. A medida que su desempeño mejoraba, su algoritmo se hacía más adepto y los investigadores intensificaban la dificultad.
“Por ejemplo, le pusimos un guante de goma en la mano, atamos algunos de sus dedos, usamos una manta para ocluir y perturbar la mano, y empujamos el Cubo de Rubik con diferentes objetos mientras intentaba resolverlo”, dijeron los investigadores.
Con el tiempo la IA aprendió a corregir errores, como girar accidentalmente una cara del cubo de Rubik demasiado lejos.
La inteligencia artificial también fue asistida por sensores visuales y el algoritmo Kociemba, diseñado específicamente para resolver el cubo de Rubik. De este modo, el algoritmo indicaba a la IA qué movimientos debía realizar, permitiendo que el software se concentre en aprender a realizar los movimientos físicos necesarios.
El tiempo que la mano robótica necesitaba para resolver el rompecabezas dependía de cuán mezclado estuvieran las piezas del cubo. El método actualmente cumple su tarea el 20% de las veces cuando se aplica un revuelto de máxima dificultad que requiere 26 rotaciones. Para los casos más sencillos que requieren 15 rotaciones, la tasa de éxito fue del 60%. El récord fue la resolución en tres minutos, dijo Wellinder.
Fuente: Infobae
